AGV伺服马达-SUW系列
AC伺服 电池 旋转变压器 带轮子
低床设计的转向单元
电池驱动用带轮子的AC伺服马达
转向机构一体带车轮的AC伺服马达。
AWRⅡ系列以车轮马达为基础装备了转向装置。进一步适配三轮台车、平行移动台车等AGV的驱动方法。
低床设计
通过在车轮部和旋转齿轮单元的安装上下功夫,实现了低床结构。
框架结构,安装简单
安装时,只需要在车体上安装框架。旋转马达安装在框架上,即使旋转时也固定。即使在运行时的旋转马达上,也可以轻松进行线缆的安装调整工作


AC伺服 电池 旋转变压器 带轮子
低床设计的转向单元
电池驱动用带轮子的AC伺服马达
转向机构一体带车轮的AC伺服马达。
AWRⅡ系列以车轮马达为基础装备了转向装置。进一步适配三轮台车、平行移动台车等AGV的驱动方法。
低床设计
通过在车轮部和旋转齿轮单元的安装上下功夫,实现了低床结构。
框架结构,安装简单
安装时,只需要在车体上安装框架。旋转马达安装在框架上,即使旋转时也固定。即使在运行时的旋转马达上,也可以轻松进行线缆的安装调整工作
AGV伺服马达-SUW系列

AC伺服 电池 旋转变压器 带轮子
低床设计的转向单元
电池驱动用带轮子的AC伺服马达
转向机构一体带车轮的AC伺服马达。
AWRⅡ系列以车轮马达为基础装备了转向装置。进一步适配三轮台车、平行移动台车等AGV的驱动方法。
低床设计
通过在车轮部和旋转齿轮单元的安装上下功夫,实现了低床结构。
框架结构,安装简单
安装时,只需要在车体上安装框架。旋转马达安装在框架上,即使旋转时也固定。即使在运行时的旋转马达上,也可以轻松进行线缆的安装调整工作
■ 规格
型号 | SUW030B | ||
车轮部 (AWRⅡ 030B-P相当) | 车轮部 | 车轮直径[mm] | φ200 |
减速比 | 1/18 | ||
齿轮倒车 | 1° | ||
******行驶速度[m/min] | 69 | ||
输出扭矩[N·m] | 20.85 | ||
瞬时******扭矩[N·m] | 41.7 | ||
车轮硬度 | 95 | ||
车轮材质[旧JIS (A型)] | 聚乙醚聚氨酯 | ||
马达部 | 额定功率[W] | 300 | |
额定(******)转速[min-1] | 2000(2000) | ||
额定(瞬时******)扭矩[N·m] | 1.43(2.94) | ||
额定(瞬时******)电流 | 20(40) | ||
刹车部 | 额定电压[V](额定电流[A] | 24(0.67) | |
静止摩擦扭矩[N·m] | 2.94 | ||
旋转齿轮 单元部 (驱动马达B300G-D2R) | 旋转齿轮部 | 总减速比 | 1/304.9 |
旋转用减速器减速比(方式) | 1/56(3点行星式) | ||
旋转用齿轮减速比(方式) | 1/5.444(平齿轮) | ||
旋转齿轮旋转速度[min-1] | 9.8 | ||
旋转齿轮扭矩[N・m] | 23 | ||
马达部 | 额定输出[W] | 30 | |
额定(******)转速[min-1] | 3000(3000) | ||
额定(瞬时******)扭矩[N・m] | 0.095(0.285) | ||
额定(瞬时******)电流[Arms] | 2.6(7.8) | ||
耐负荷[N] | 3920 | ||
质量[Kg] | 约49(车轮部约30 旋转齿轮单元约19) | ||
组合驱动器 | ABH3-0606 | ||
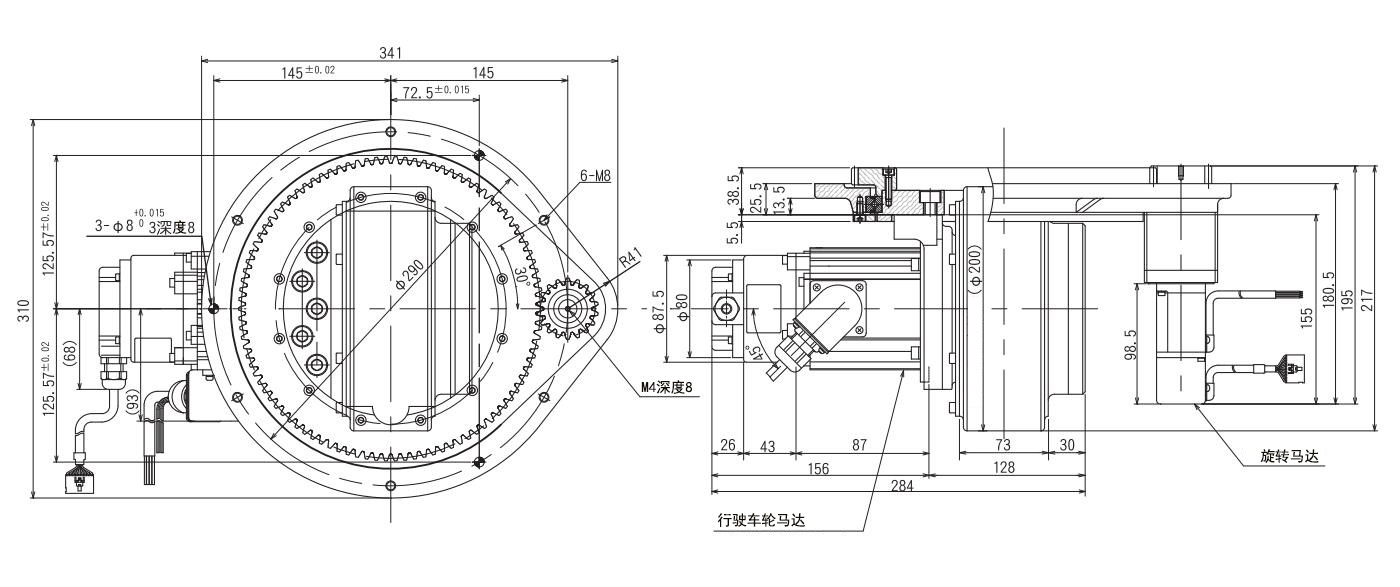
■ 尺寸
友情连接: AGV小车 明电舍AGV、明电舍、AGV小车、恺胜机器人
主要销售:日本agv,无人搬运车、自动搬运车行业、agv小车的agv平台!
©2018 恺胜机器人科技(苏州)有限公司 苏ICP备18033254号-2 技术支持:汇成传媒
